Shader数学基础
Shader数学基础
1. 笛卡尔坐标系
二维坐标系OpenGL的原点在屏幕左下方,而DX的原点在屏幕左上方。
- 相关概念
- 基矢量:坐标系的三个坐标轴;
- 标准正交基:三个坐标轴相互垂直,长度为1;
- 正交基:相互垂直但长度不为1;
- 左手坐标系/右手坐标系:拇指x,食指y,中指z;
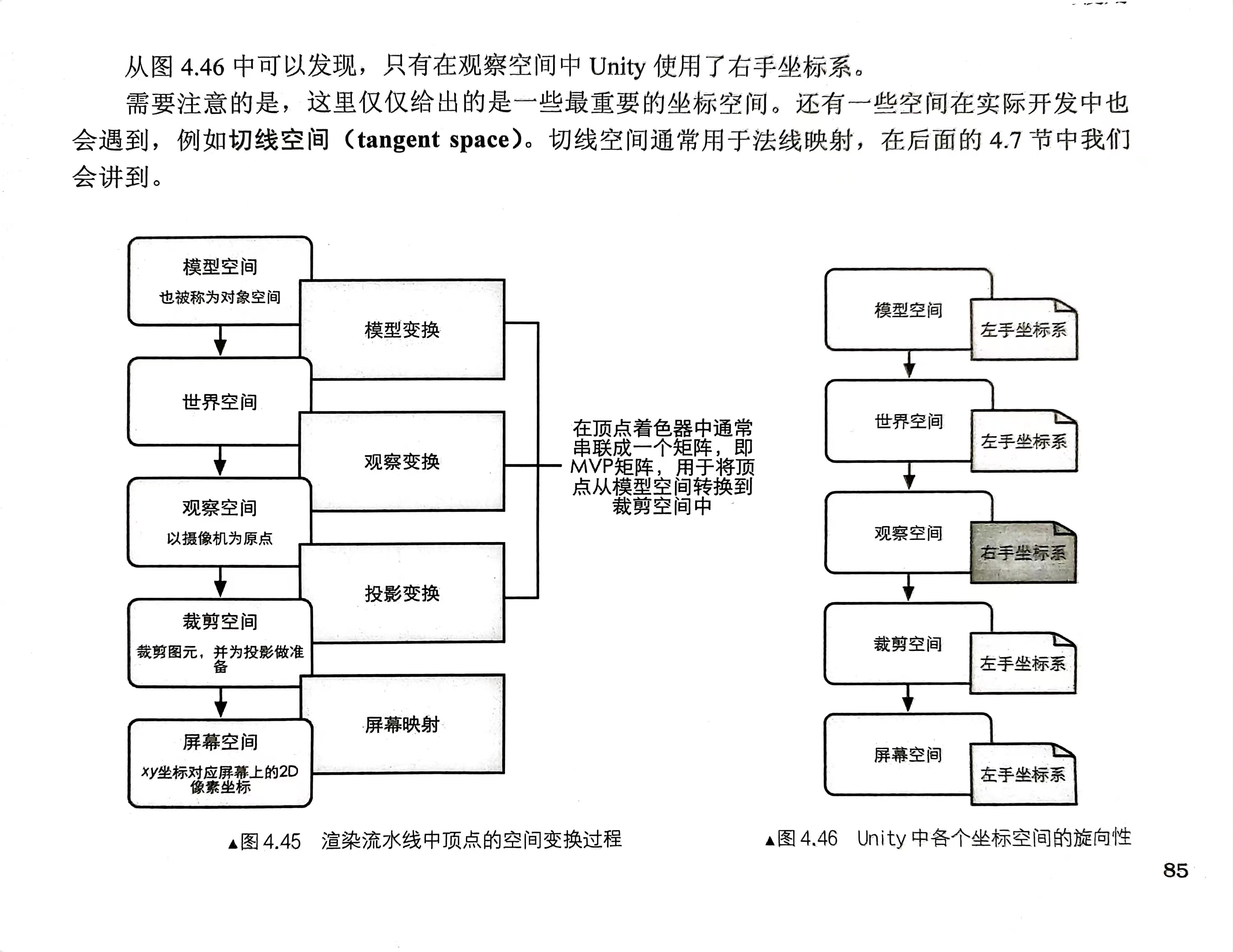
- 在Unity中,模型空间使用的是左手坐标系,观察空间使用的是右手坐标系;
2. 点和矢量
-
相关概念
- 点:代表n维空间中的一个位置;
- 矢量:包含模和方向;通常被用于表示相对于某个点的偏移;
- 矢量点积(内积):点积是把两个矢量对应分量相乘后再取和,最后结果是标量;点积的几何意义是投影;a点乘b相当于计算b在a方向上的投影,然后在乘上a的模;
- 矢量叉积(外积):叉积的结果是矢量; |axb|=|a||b|Sinθ;平行四边形面积;常应用于计算垂直于一个平面,三角形的矢量,判断三角形面片的朝向;
- 叉积相关计算公式👇:
3. 矩阵
- 相关概念
- 方块矩阵:行列数目相等;
- 对角矩阵:除了对角线外其余所有元素为0;
- 单位矩阵I:对角矩阵,且对角线元素为1;
- 转置矩阵:对原矩阵进行转置运算;(AB)T=BTAT;
- 逆矩阵:如果有一个逆矩阵,则这个矩阵可逆;矩阵的行列式不为0,则该矩阵可逆;MM-1=M-1M=I;(M-1)T=(MT)-1; (AB)-1=B-1A-1;
- 正交矩阵:一个矩阵和它的转置矩阵的乘积是单位矩阵;M-1=MT;正交矩阵的每一行都应该是单位矢量,这样它们与自己的乘积才能为1,且行彼此之间相互垂直,这样与彼此的乘积才能为0;
- 正交基:一组基矢量之间相互垂直;
- 标准正交基:满足正交基的情况下矢量的模为1;
- 行矩阵/列矩阵:矩阵乘法次序对运算复杂度有影响,矩阵乘法不满足交换律,在Unity中一般都把矢量放在矩阵的右侧,把矢量转换成列矩阵来运算;
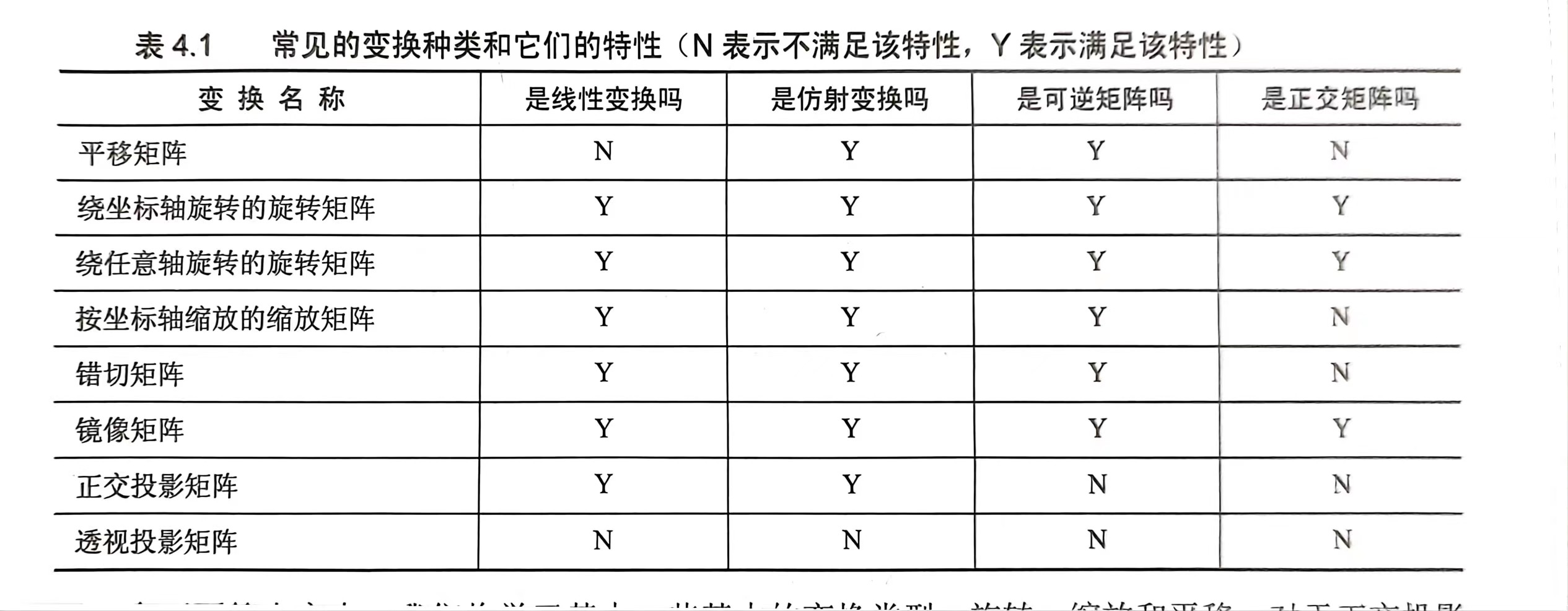
- 矩阵变换的几何意义
-
线性变换:缩放,旋转,错切,镜像,正交投影;
-
仿射变换:线性变换+平移变换;可以使用4x4矩阵来表示,需要把矢量拓展到四维空间下,也就是齐次坐标空间 ;
-
齐次坐标:四维矢量,点的w为1,向量的w为0;对于一个点,平移,缩放,旋转效果都能够施加上,然而对于方向向量,平移的效果就会被忽略;
-
复合变换:缩放-旋转-平移;
- 变换的次序不同,得到的变化结果也是不同的;
- 旋转变化:unity中的旋转变化默认是zxy变化,即按照坐标系E的z,y,x轴进行变化;
-
4. 坐标空间
- 相关概念
-
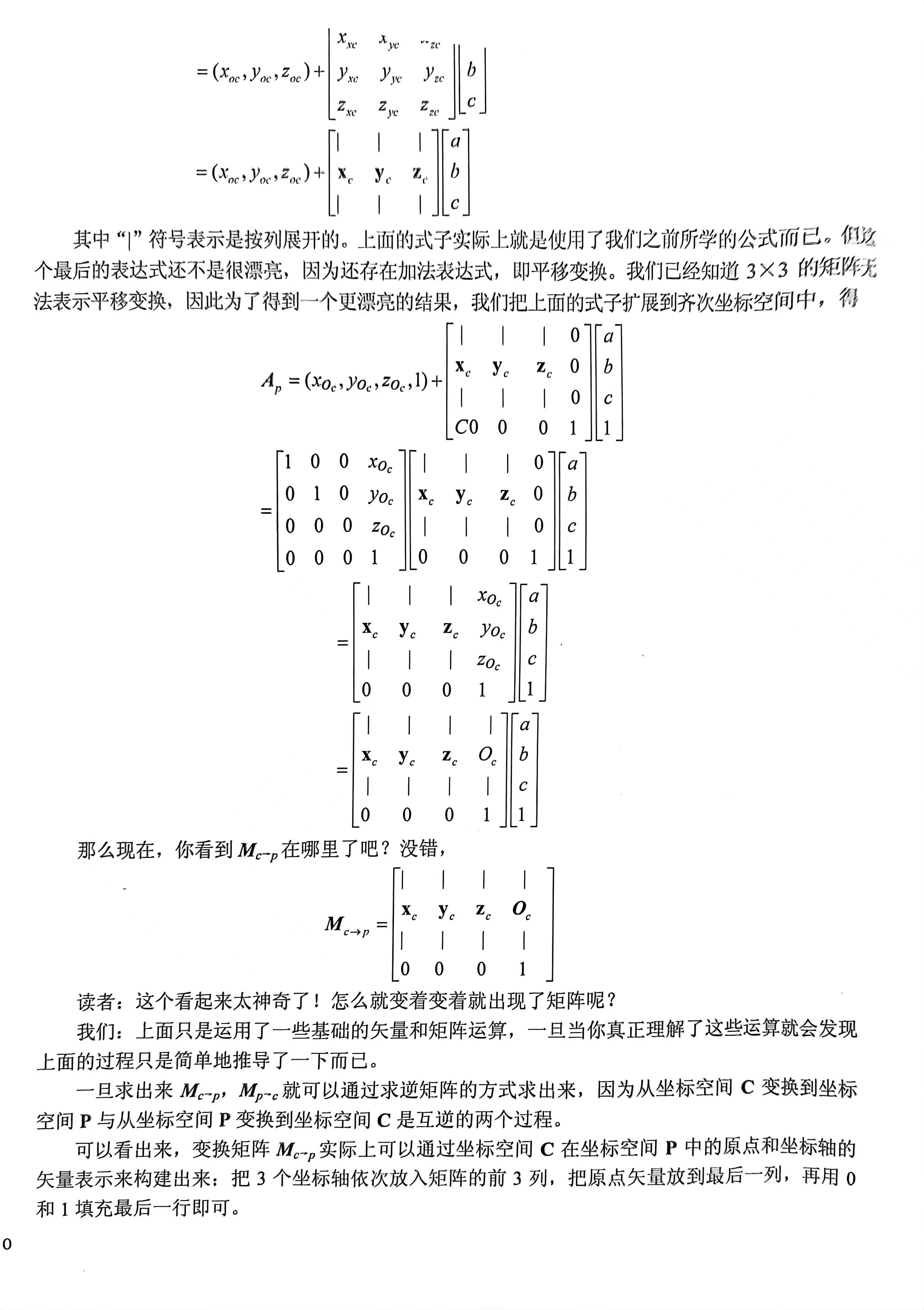
定义坐标空间需要一个原点和三个坐标轴方向,而这是基于另一个坐标空间的,即每个坐标空间都是另一个坐标空间的子空间;
-
子坐标空间c到父坐标空间p的转换计算可以总结为:
-
对矢量的坐标空间变换可以仅用3x3矩阵表示,因为矢量是没有位置的不需要平移变换;unity中经常使用变换矩阵的前三行前三列来对法线方向,光照方向进行空间变化;
-
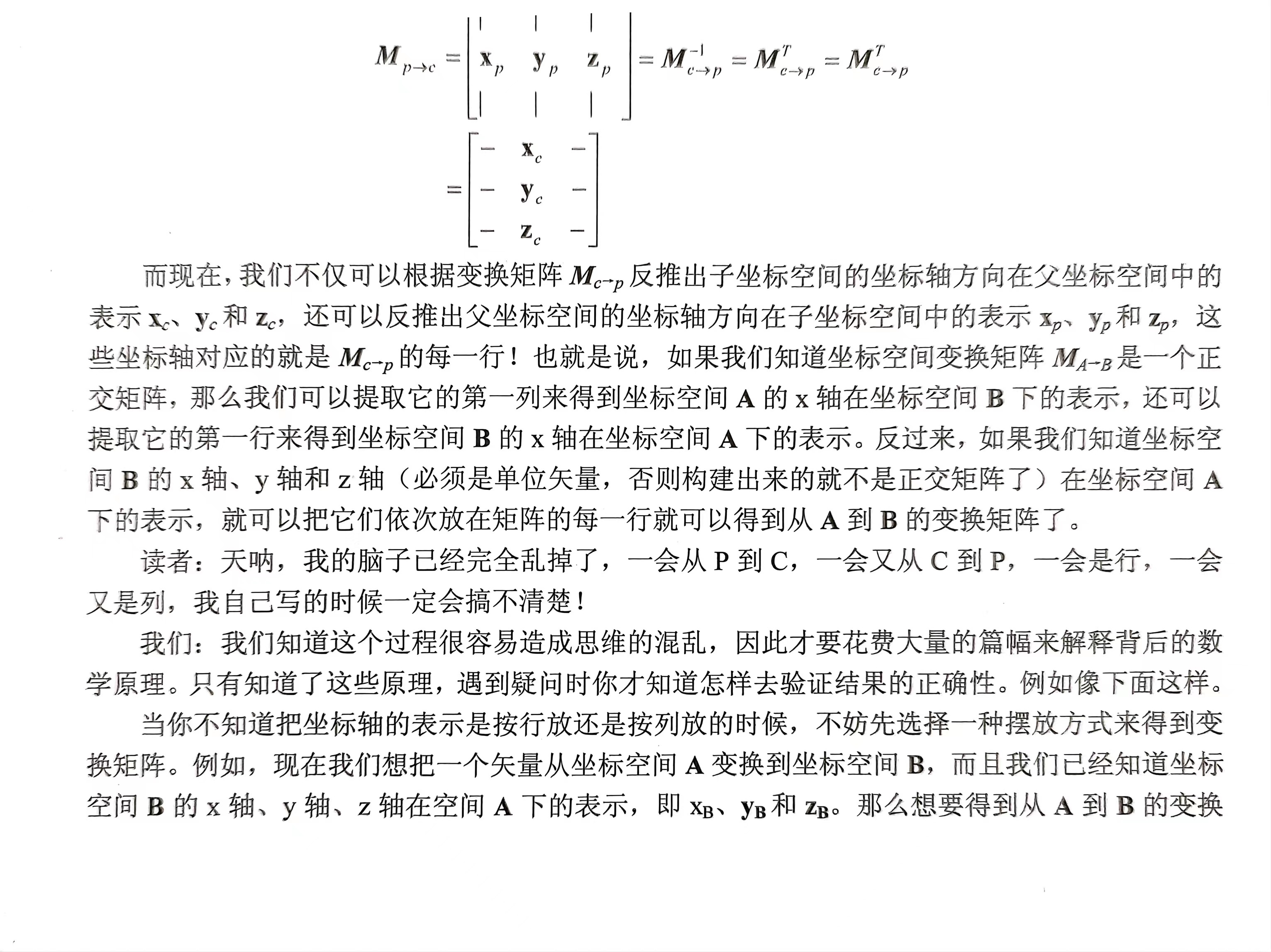
如果变换矩阵Mcp正交,那么可以由其转置直接获得Mpc,进而获得xp,yp,zp向量;即在矩阵中读取列表示前一个坐标空间的方向轴,读取行表示后一个坐标空间的方向轴;
-
模型空间:unity的模型空间是左手坐标系;由美术人员在建模软件中确定好位置;
-
世界空间:unity通过transform修改position改变模型的位置,位置值是相对transform父节点的,如果没有父节点,则位置为世界坐标系中的位置;
-
观察空间:不同于屏幕空间的二维,观察空间是一个三维空间,unity在观察空间中使用右手坐标系,这也是符合OpenGL传统的,摄像机的正前方指向的是-z方向;
-
裁剪空间:也称齐次裁剪空间,位于裁剪空间内的图元会被保留,为投影操作进行准备,视锥体有正交投影和透视投影两种;在unity中,裁剪空间到屏幕空间是unity直接帮忙完成的,所以unity中只需要把模型空间转到裁剪空间即可;
-
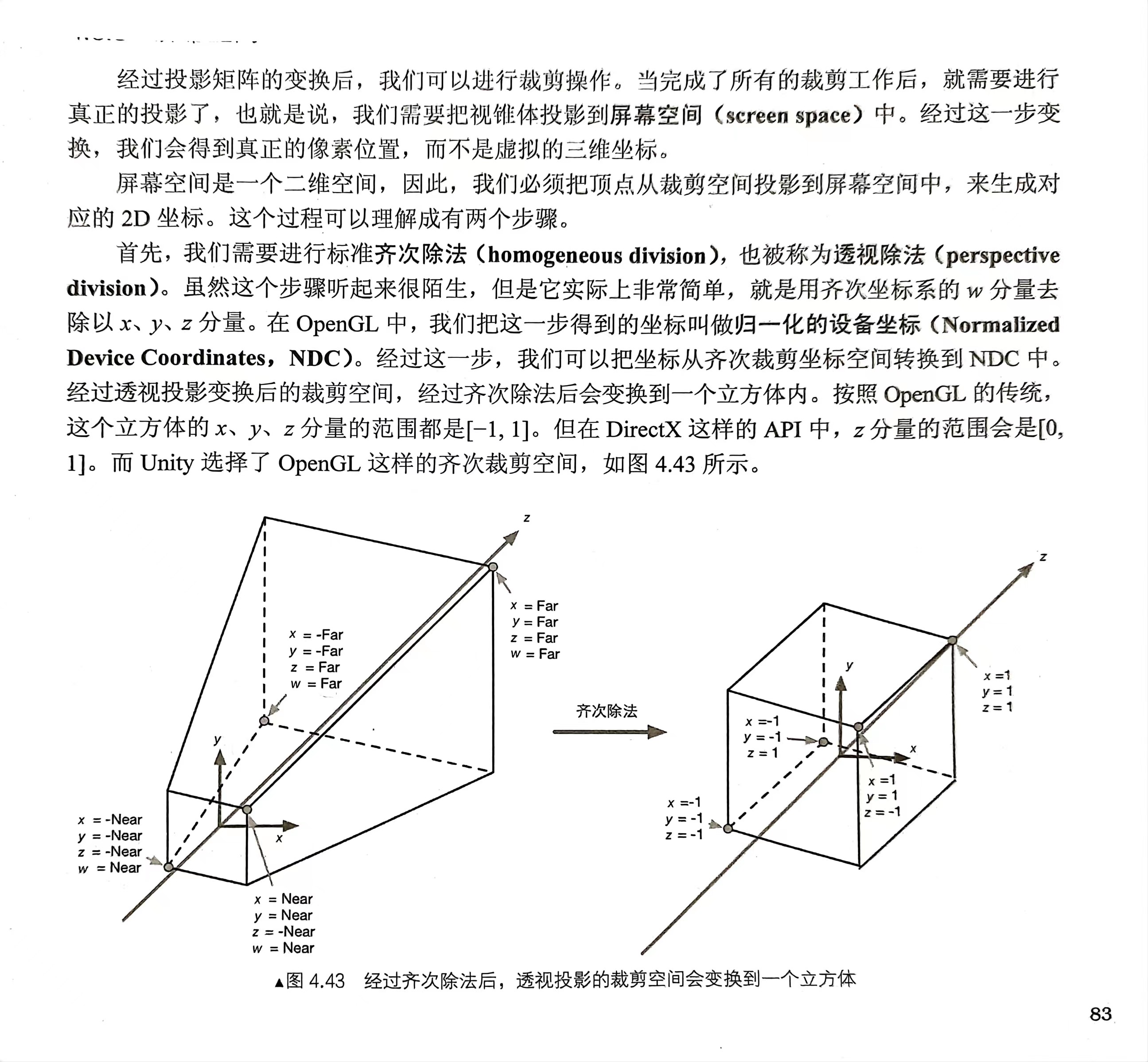
**屏幕空间:**完成裁剪工作之后,需要把视锥体投影到屏幕空间,经过投影,可以获得真正的像素位置,而不是虚拟的三维坐标;使用透视除法(xyz/w)获得标准设备坐标NDC,在OpenGL中,xyz范围都为-1到1,而在DX中,z的范围是0到1;
-
模型变换:模型空间→世界空间;
-
观察变换:世界空间→观察空间;观察相机在世界坐标系中的变化,进行逆变换后对z坐标进行取反操作即可获得变换矩阵;
-
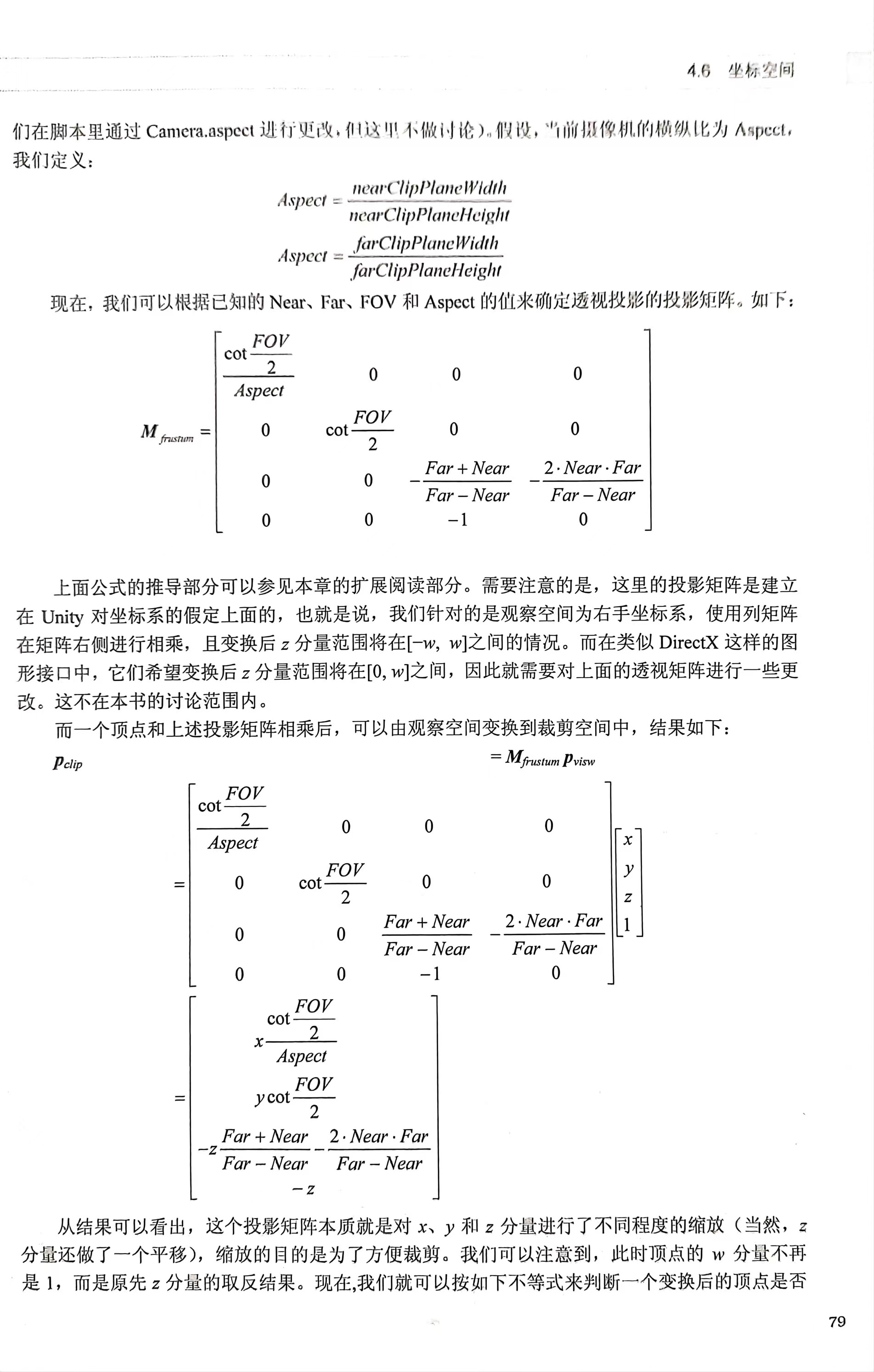
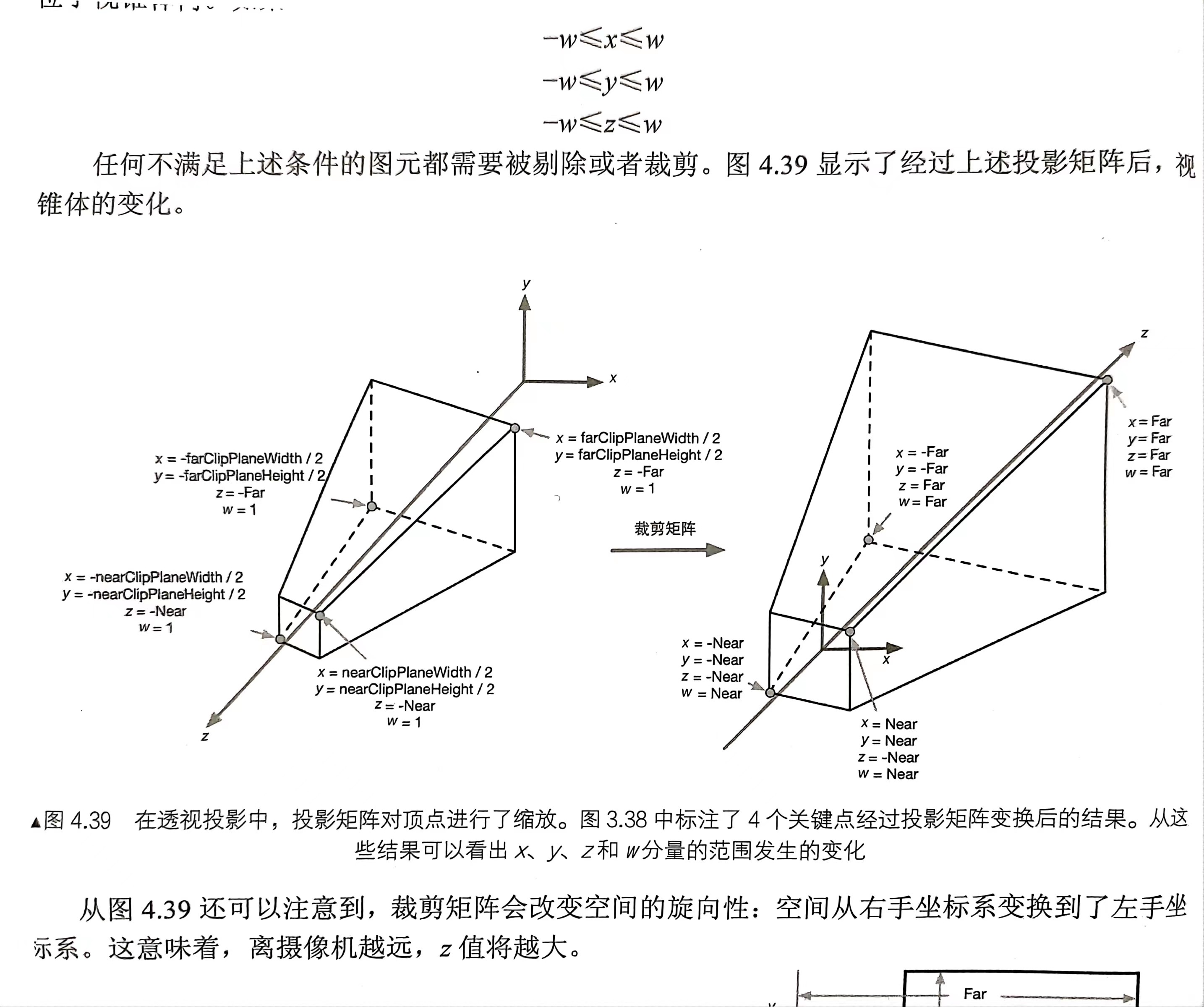
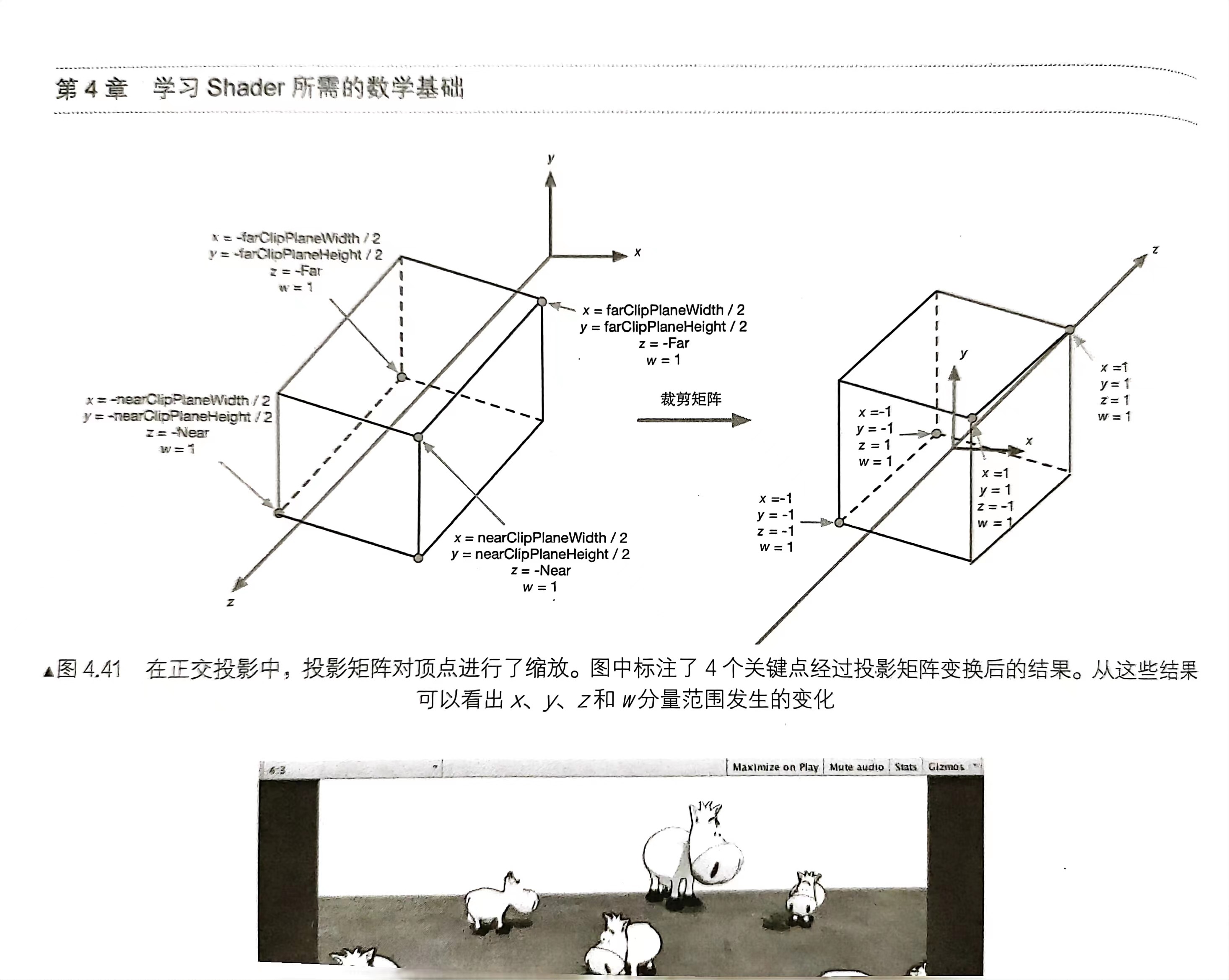
透视投影变换:投影变换没有真正的进行投影,而是为投影做准备,透视投影将相机空间中的点从视锥体(frustum)变换到规则观察体(Canonical View Volume)中(对xyz分量进行了不同程度的缩放,z坐标还做了平移变换)。投影变换以后如果顶点在视锥体内,则其坐标必须满足:-w ≤ x/y/z ≤ w;
-
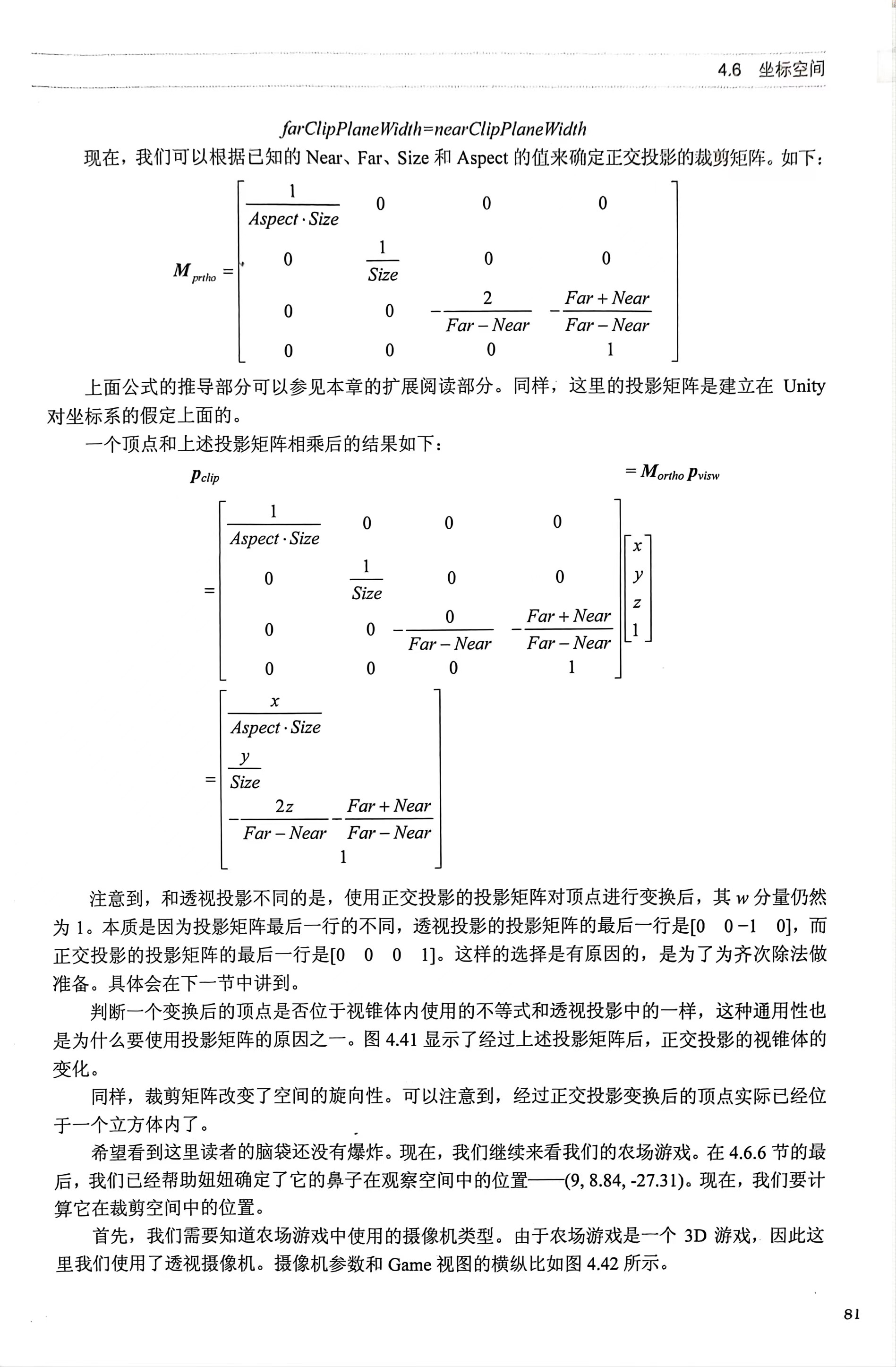
**正交投影变换:**使用正交投影矩阵对顶点进行变换后,其w分量仍然为1,本质是因为投影矩阵的最后一行不同(0 0 -1 0)和(0 0 0 1)
-
5. 法线变换
-
相关概念
- 法线(法矢量)
- 切线(切矢量)
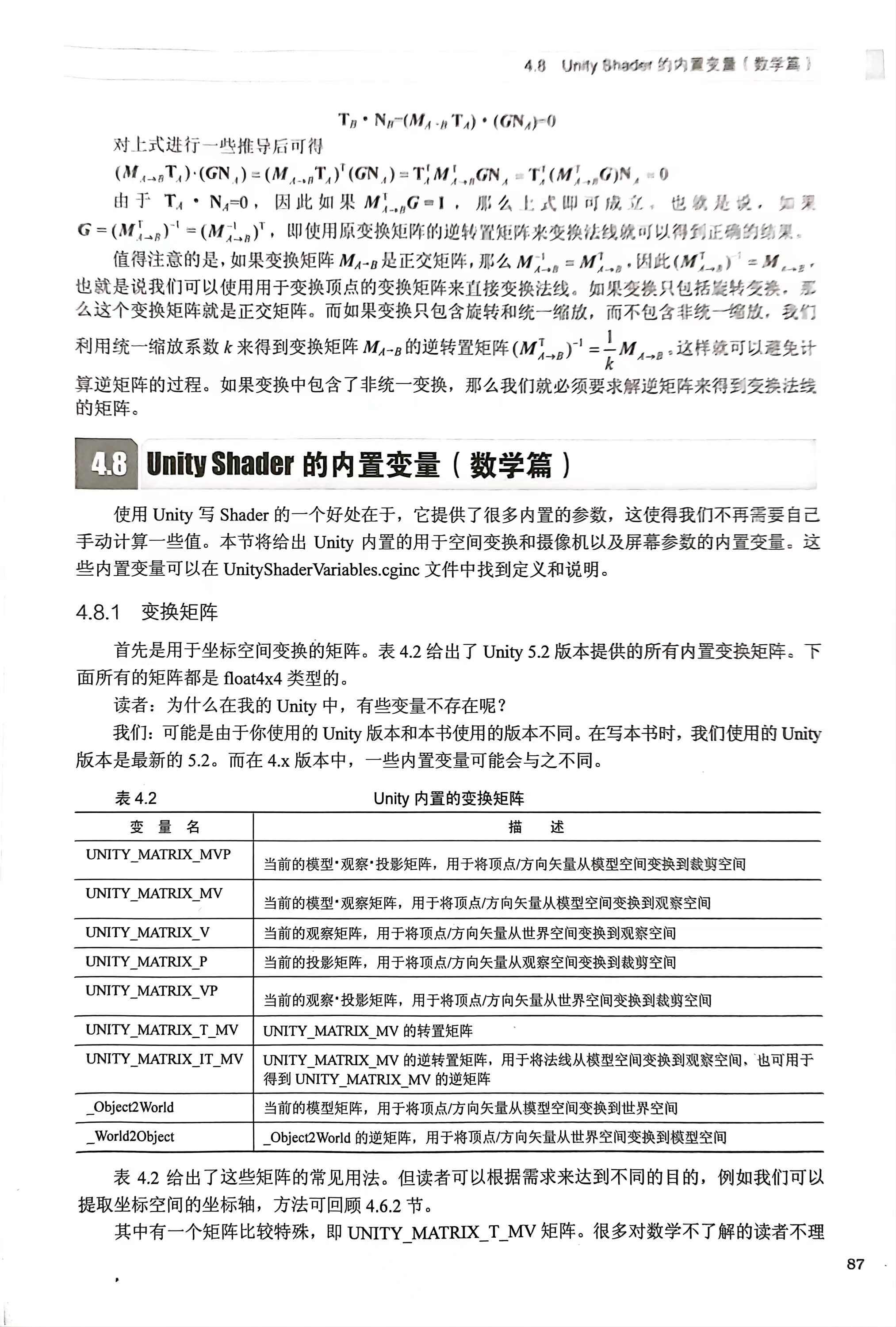
- 法线变换:法线变换需要逆切线变换;计算的理论是切线点乘法线结果为0;**用原变化矩阵的逆转置矩阵来变换法线就可以得到正确的结果。**如果顶点的变换矩阵Mab是正交矩阵,则可以直接用Mab(T)=Mab(-1)计算得到Mab的逆转置矩阵为1/K*Mab.
-
UNITY_MATRIX_MV如果只是进行了旋转变换,那么UNITY_MATRIX_MV是正交矩阵,UNITY_MATRIX_T_MV是其逆矩阵;
Shader基础
vert/frag基础
1 | //编译指令:某个函数包含顶点,片元着色器的代码 |
模型数据
1 | // 定义模型数据 |
vert/frag通信
1 | // 使用结构体定义vert输出数据 |
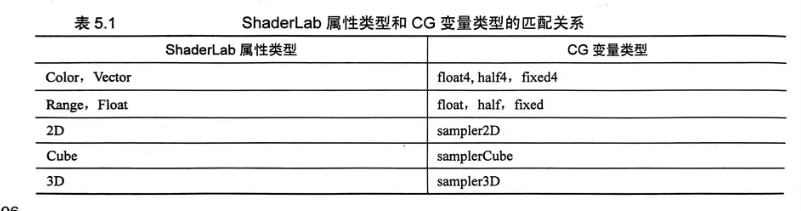
属性使用
1 | Shader "xxx"{ |
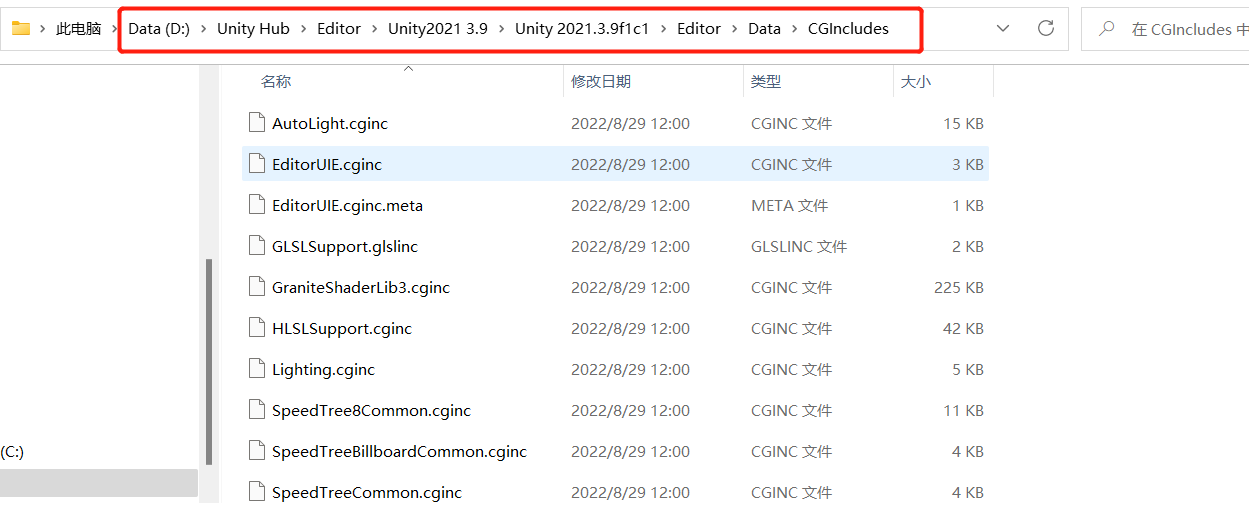
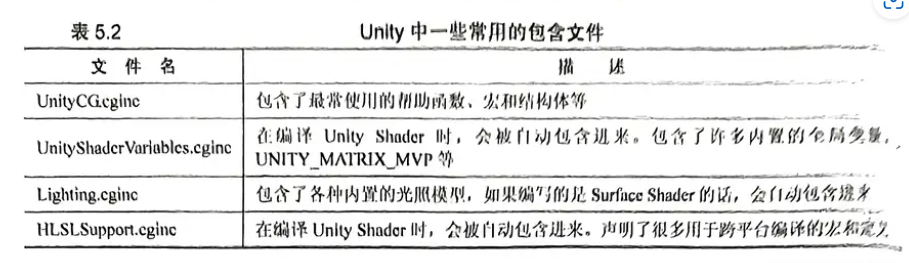
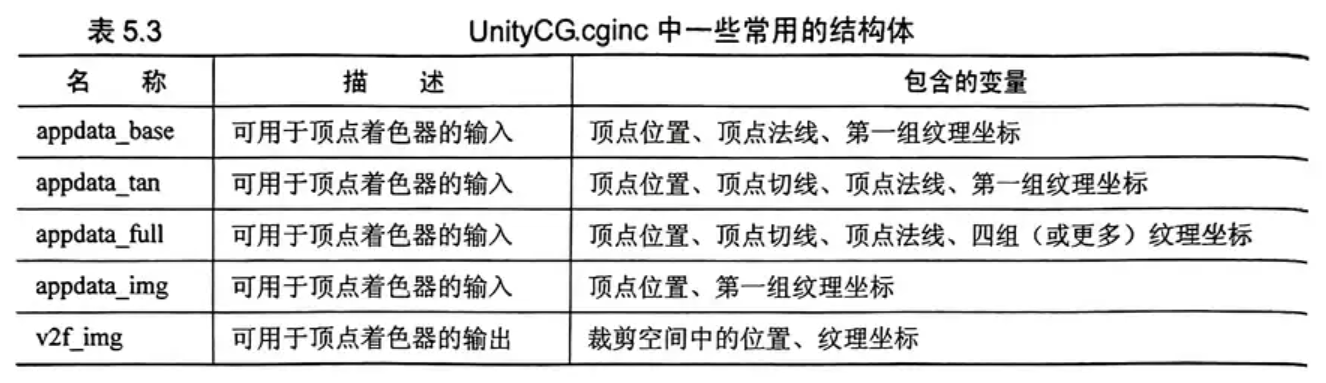
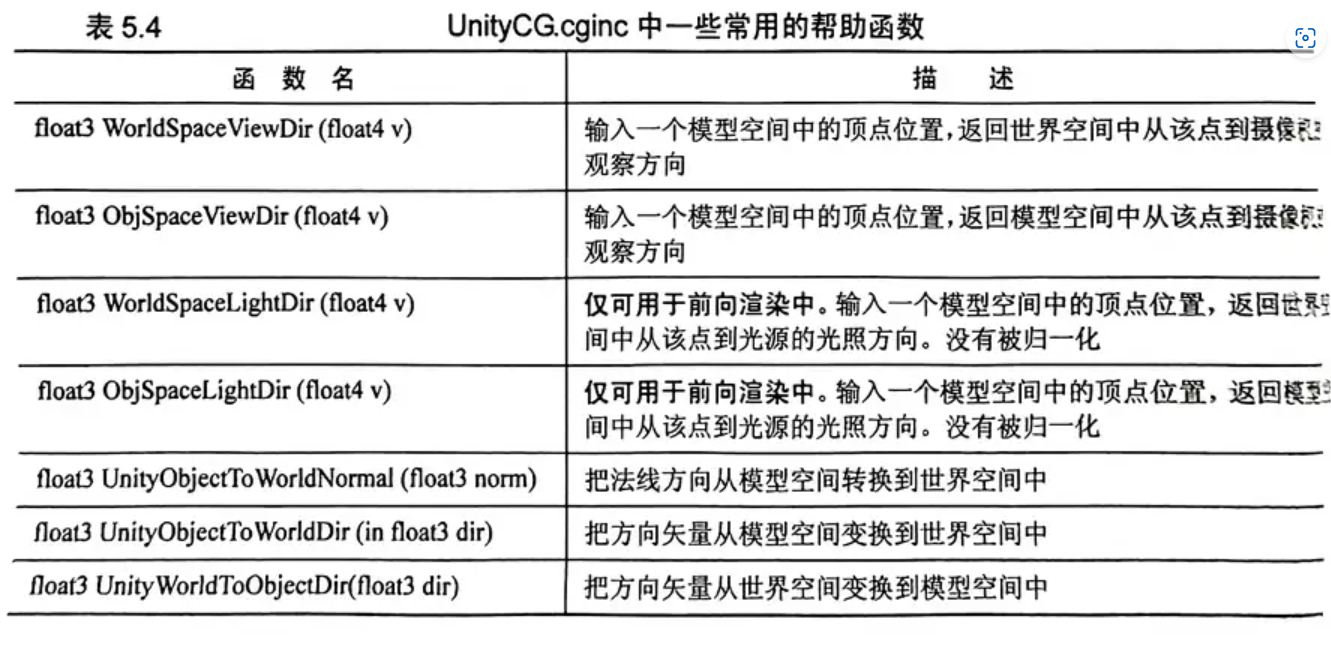
Unity内置文件和变量
1 | // unity中有很多内置文件 |
在windows中内置文件的位置如下:
部分文件是不需要include也会自动包含进来的。
Unity提供的CG/HLSL语义
语义实际就是一个赋给shader的输入输出字符串,这个字符串表达了变量的含义。
让shader知道在哪里读数据,并把数据输出到哪里。unity没有支持所有的语义。
从DX10开始出现了一种新的语义类型,即是“系统数值语义”,以SV开头,在渲染流水线中具有特殊的含义。
用这些语义描述的变量是不可以随便赋值的,流水线需要它们来完成特定的目的。
比如渲染引擎会把SV_POSITION修饰的变量经过光栅化后显示在屏幕上。为了shader有更好的跨平台性,最好特殊含义的变量都用数值语义修饰。
一个语义可以使用的寄存器只能处理四个浮点值,对于矩阵的处理,可以进行拆分后再处理。
Shader Debug
vs种的graphics debugger可以对shader进行调试。
intel gpa,renderdoc,nvidia nsight,amd gpu perfstudio等工具都可以获得帧的信息。
unity是跨平台的,会在背后帮忙处理dx平台可能出现的纹理翻转问题,当开启抗锯齿的时候unity不会帮忙翻转纹理,此时需要手动操作。
1 |
|
remark: 在shader中应该慎用分支和循环语句,这样可以提高shader的性能。
同时不要在计算中出现除0,这样得到的结果是不可预测的。
Unity基础光照
-
标准光照模型BRDF
自发光emissive 高光反射specular 不符合lambert定律,利用phong模型计算。blinn对该模型进行了优化,避免计算反射光线,h=(v+I)/ (v+I),使用n和h的夹角代替计算v和r。 漫反射diffuse 符合lambert定律,反射光线的强度和表面法线和光源方向的夹角余弦值成正比。 环境光ambient 间接光照,相当于反射的光照 -
mdiffuse为漫反射颜色,需避免其余弦值为负数以防止物体被它背后的光源照亮。
mglass是材质的反光度,控制亮点的宽度,mpecular是高光颜色,clight是光源颜色和强度。
-
逐像素光照与注定点光照
在片元着色器中计算是“逐像素光照”,以像素为基础,得到它的法线(法线纹理采样/顶点法线插值计算得到)。在面片之间对顶点法线进行插值的技术被称为phong着色。
在顶点着色器中计算是“逐顶点光照”,也叫做**高洛德着色。**在每个顶点处计算光照,然后再渲染图原内部进行线性插值,最后输出成像素颜色。
顶点数目要远远小于像素数,所以逐顶点计算量要小于逐像素着色。但是当光照模型中有非线性的计算时,逐顶点光照计算就不适用了。